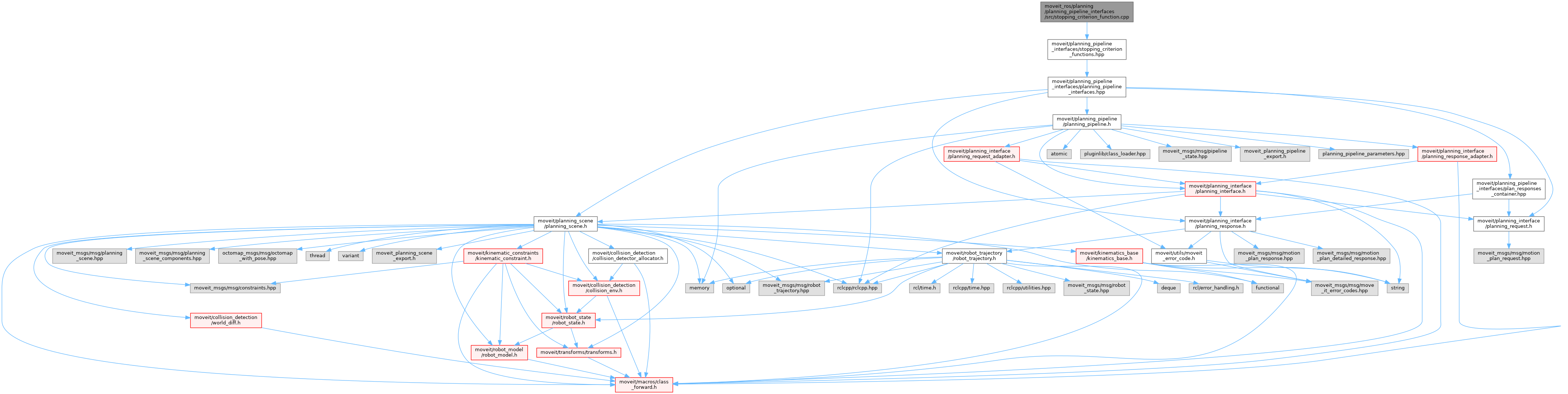
Include dependency graph for stopping_criterion_function.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | moveit |
| Main namespace for MoveIt. | |
| namespace | moveit::planning_pipeline_interfaces |
Functions | |
| bool | moveit::planning_pipeline_interfaces::stopAtFirstSolution (const PlanResponsesContainer &plan_responses_container, const std::vector<::planning_interface::MotionPlanRequest > &plan_requests) |
| A callback function that can be used as a parallel planning stop criterion. It stops parallel planning as soon as any planner finds a solution. | |