Public Member Functions | |
| MoveGroupInterfaceImpl (const rclcpp::Node::SharedPtr &node, const Options &opt, const std::shared_ptr< tf2_ros::Buffer > &tf_buffer, const rclcpp::Duration &wait_for_servers) | |
| ~MoveGroupInterfaceImpl () | |
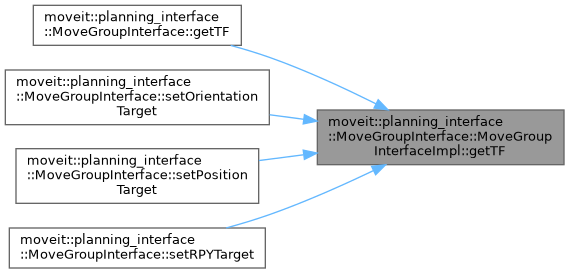
| const std::shared_ptr< tf2_ros::Buffer > & | getTF () const |
| const Options & | getOptions () const |
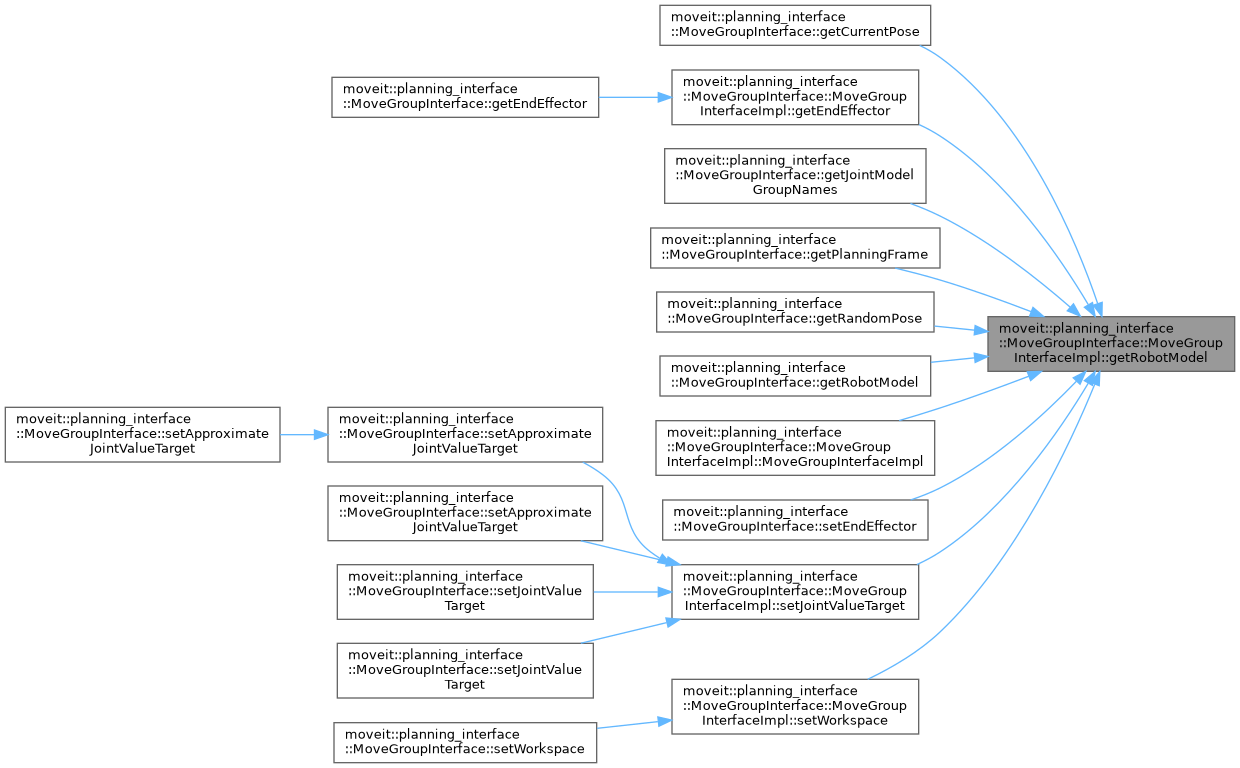
| const moveit::core::RobotModelConstPtr & | getRobotModel () const |
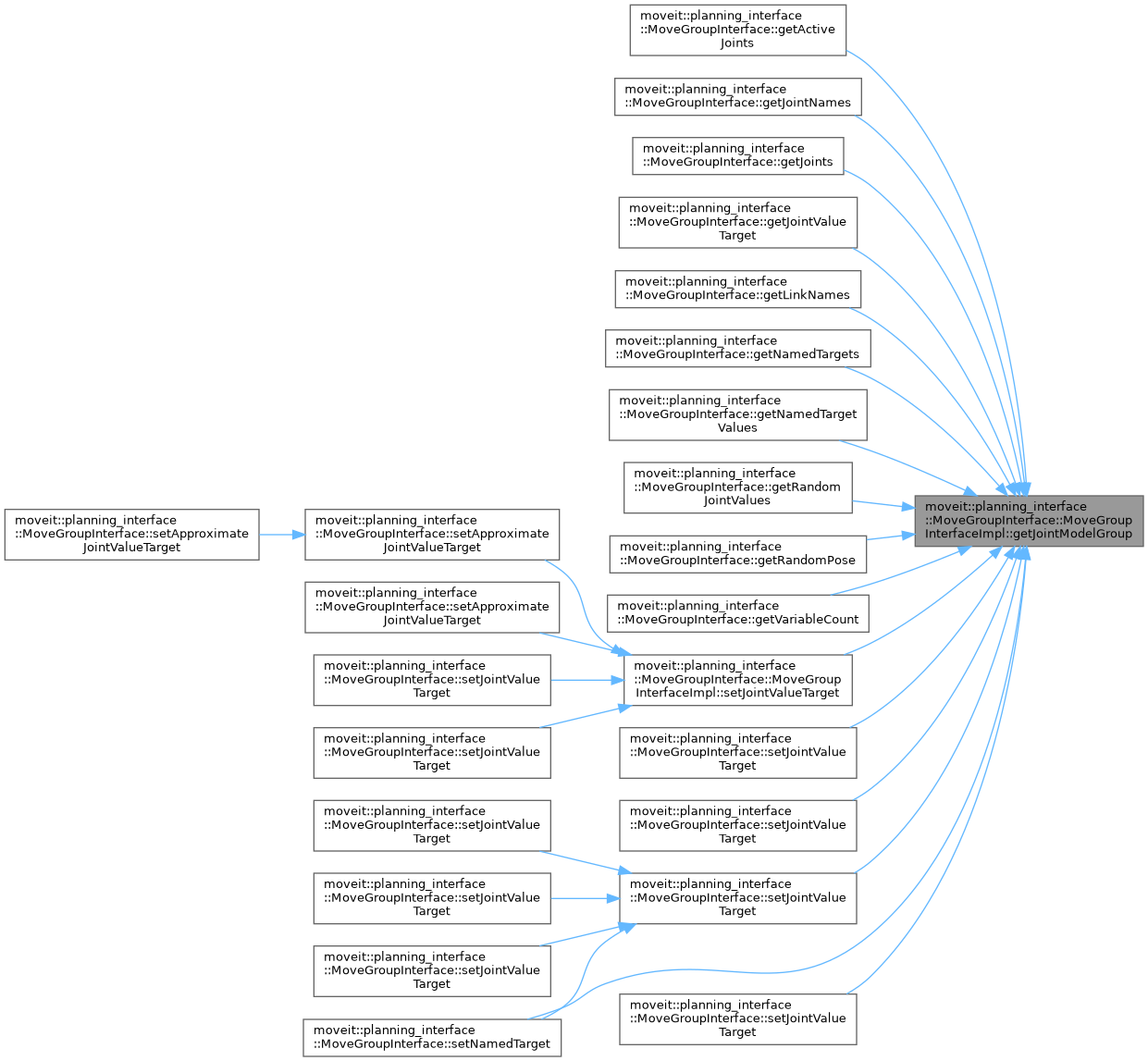
| const moveit::core::JointModelGroup * | getJointModelGroup () const |
| rclcpp_action::Client< moveit_msgs::action::MoveGroup > & | getMoveGroupClient () const |
| bool | getInterfaceDescription (moveit_msgs::msg::PlannerInterfaceDescription &desc) |
| bool | getInterfaceDescriptions (std::vector< moveit_msgs::msg::PlannerInterfaceDescription > &desc) |
| std::map< std::string, std::string > | getPlannerParams (const std::string &planner_id, const std::string &group="") |
| void | setPlannerParams (const std::string &planner_id, const std::string &group, const std::map< std::string, std::string > ¶ms, bool replace=false) |
| std::string | getDefaultPlanningPipelineId () const |
| void | setPlanningPipelineId (const std::string &pipeline_id) |
| const std::string & | getPlanningPipelineId () const |
| std::string | getDefaultPlannerId (const std::string &group) const |
| void | setPlannerId (const std::string &planner_id) |
| const std::string & | getPlannerId () const |
| void | setNumPlanningAttempts (unsigned int num_planning_attempts) |
| void | setMaxVelocityScalingFactor (double value) |
| double | getMaxVelocityScalingFactor () const |
| void | setMaxAccelerationScalingFactor (double value) |
| double | getMaxAccelerationScalingFactor () const |
| void | setMaxScalingFactor (double &variable, const double target_value, const char *factor_name, double fallback_value) |
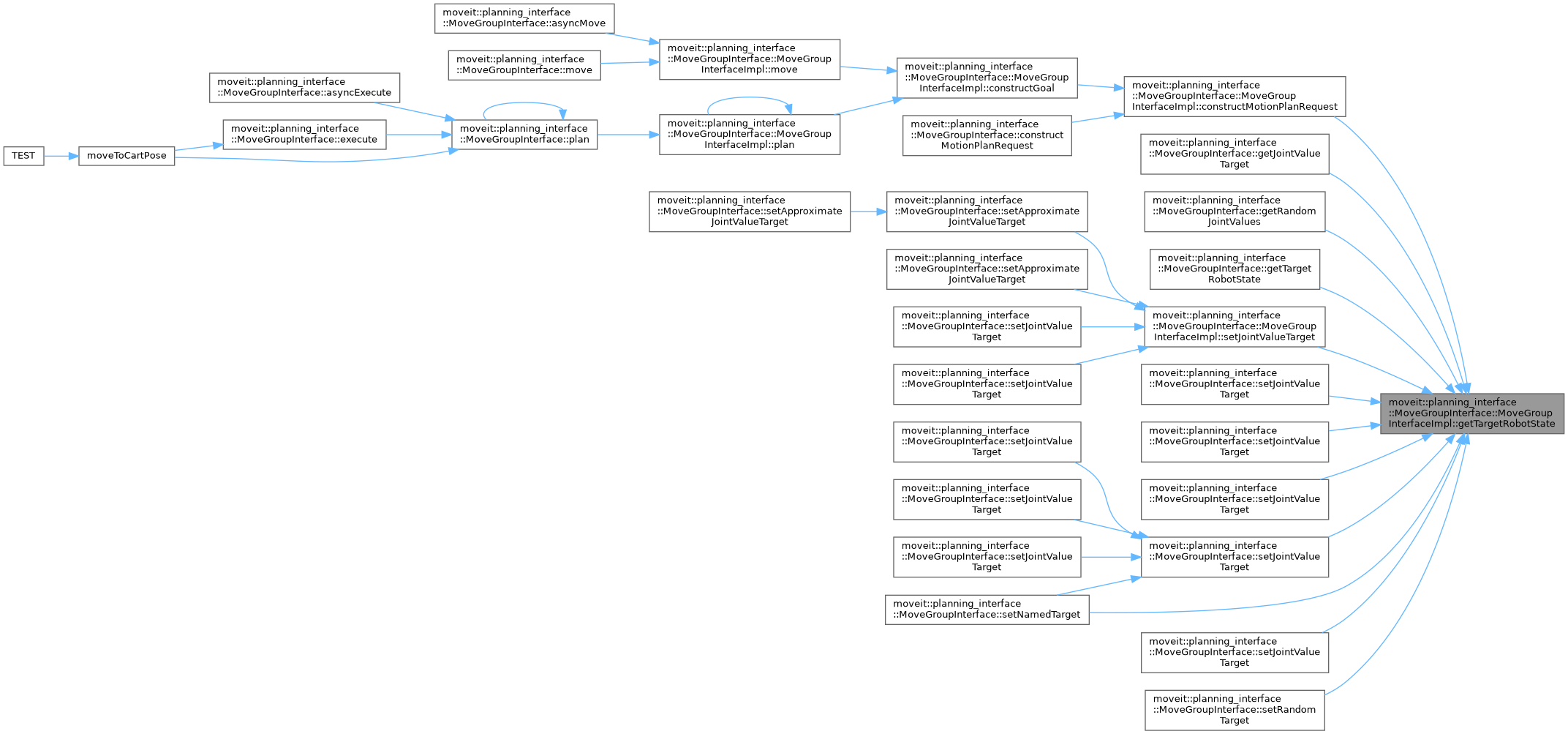
| moveit::core::RobotState & | getTargetRobotState () |
| const moveit::core::RobotState & | getTargetRobotState () const |
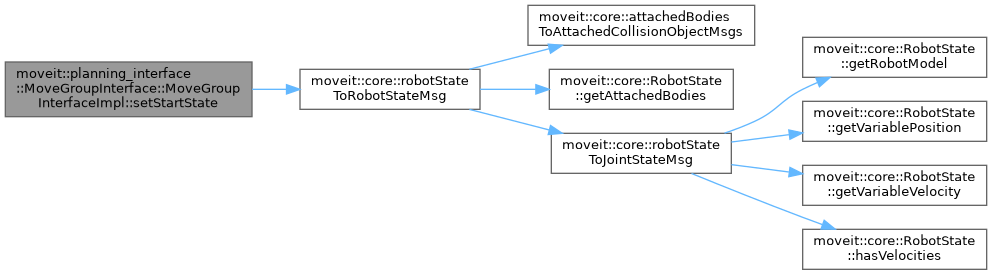
| void | setStartState (const moveit_msgs::msg::RobotState &start_state) |
| void | setStartState (const moveit::core::RobotState &start_state) |
| void | setStartStateToCurrentState () |
| moveit::core::RobotStatePtr | getStartState () |
| bool | setJointValueTarget (const geometry_msgs::msg::Pose &eef_pose, const std::string &end_effector_link, const std::string &frame, bool approx) |
| void | setEndEffectorLink (const std::string &end_effector) |
| void | clearPoseTarget (const std::string &end_effector_link) |
| void | clearPoseTargets () |
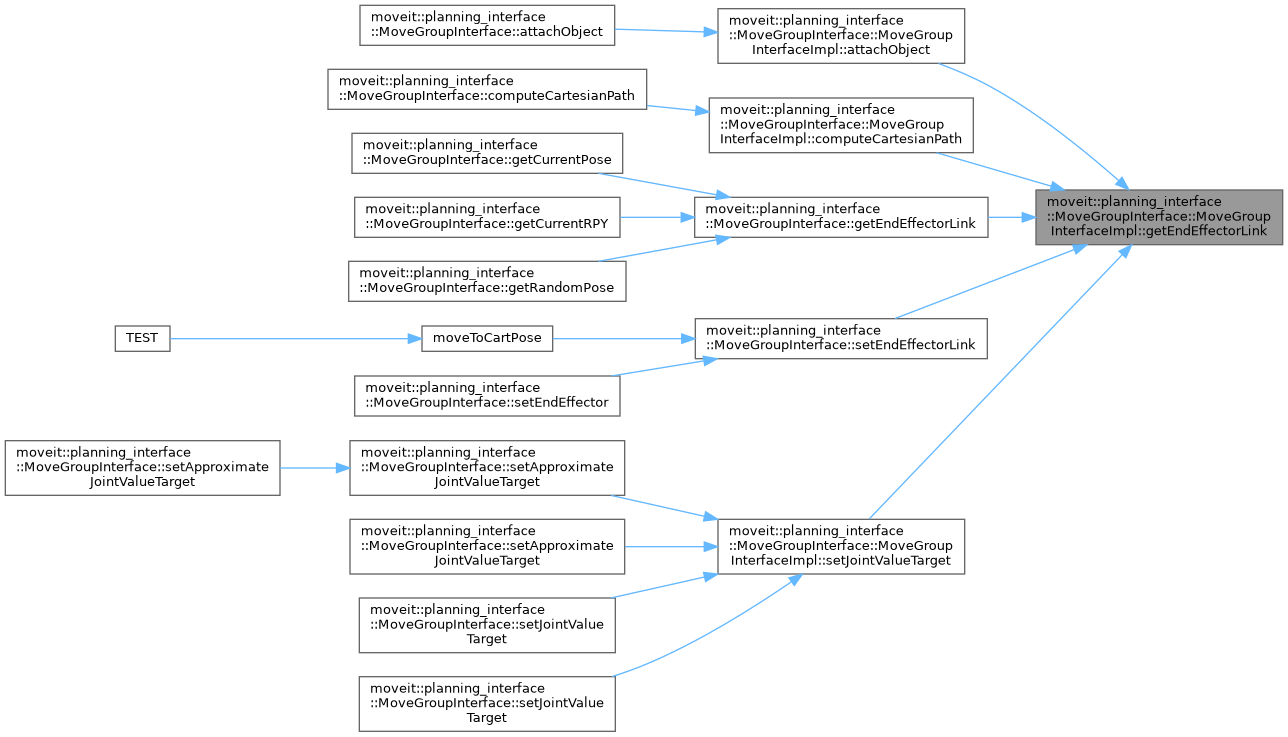
| const std::string & | getEndEffectorLink () const |
| const std::string & | getEndEffector () const |
| bool | setPoseTargets (const std::vector< geometry_msgs::msg::PoseStamped > &poses, const std::string &end_effector_link) |
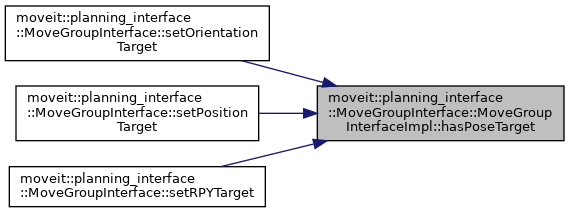
| bool | hasPoseTarget (const std::string &end_effector_link) const |
| const geometry_msgs::msg::PoseStamped & | getPoseTarget (const std::string &end_effector_link) const |
| const std::vector< geometry_msgs::msg::PoseStamped > & | getPoseTargets (const std::string &end_effector_link) const |
| void | setPoseReferenceFrame (const std::string &pose_reference_frame) |
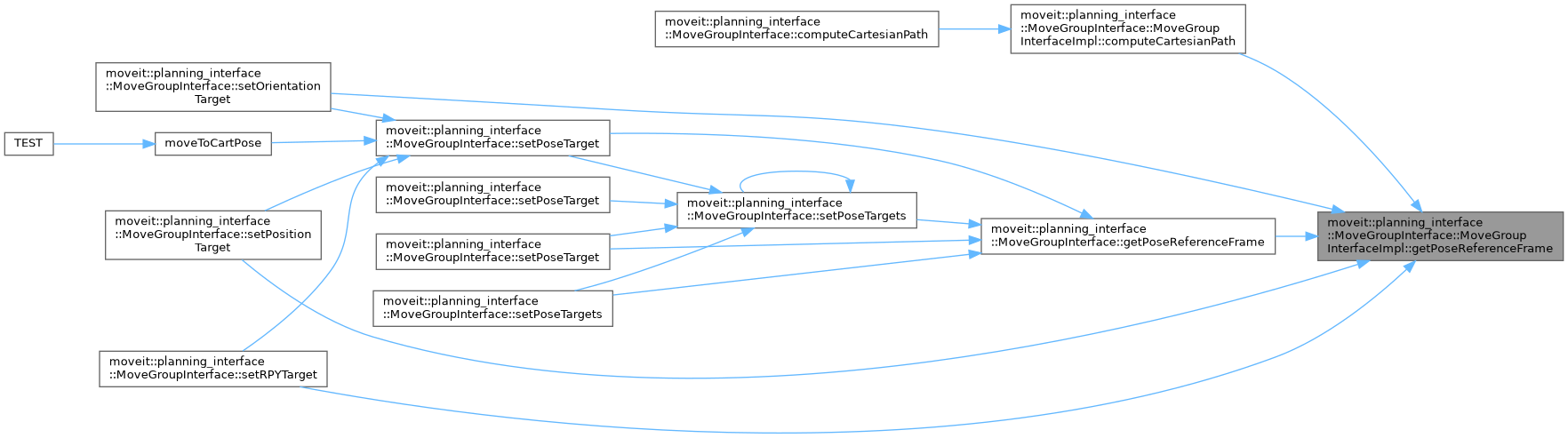
| const std::string & | getPoseReferenceFrame () const |
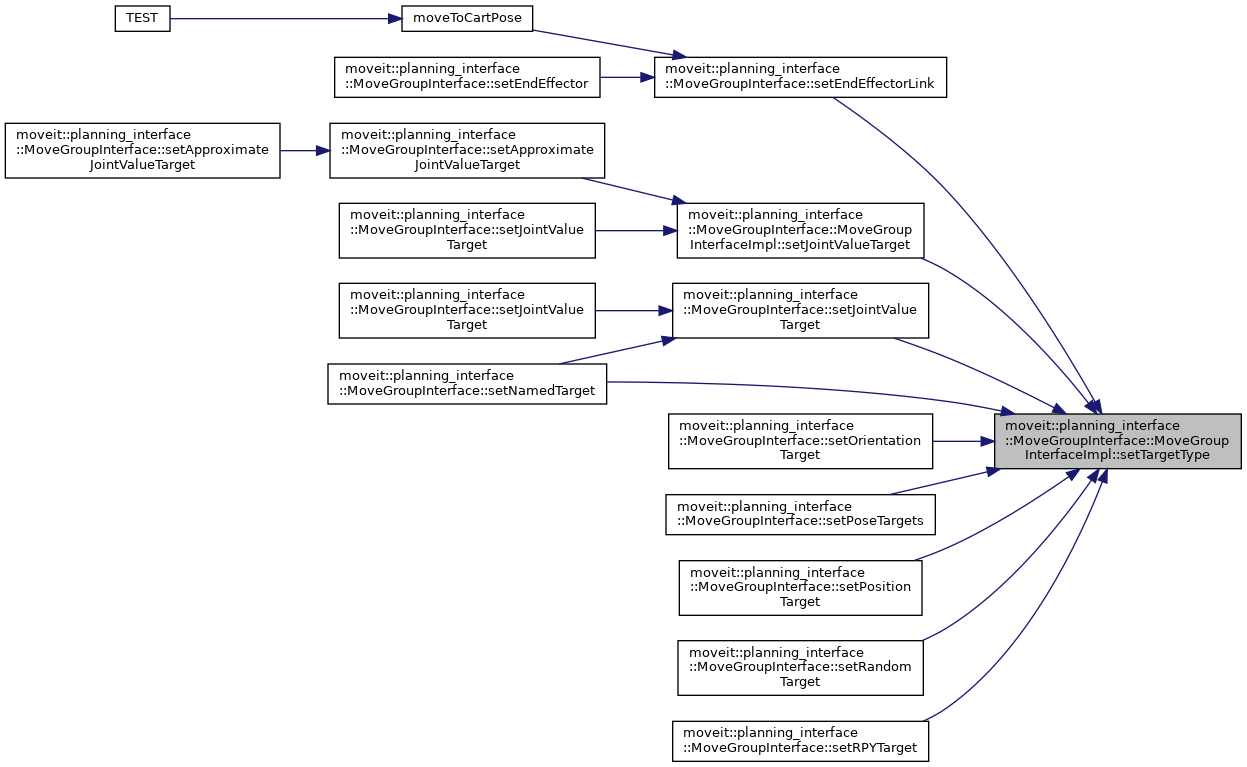
| void | setTargetType (ActiveTargetType type) |
| ActiveTargetType | getTargetType () const |
| bool | startStateMonitor (double wait) |
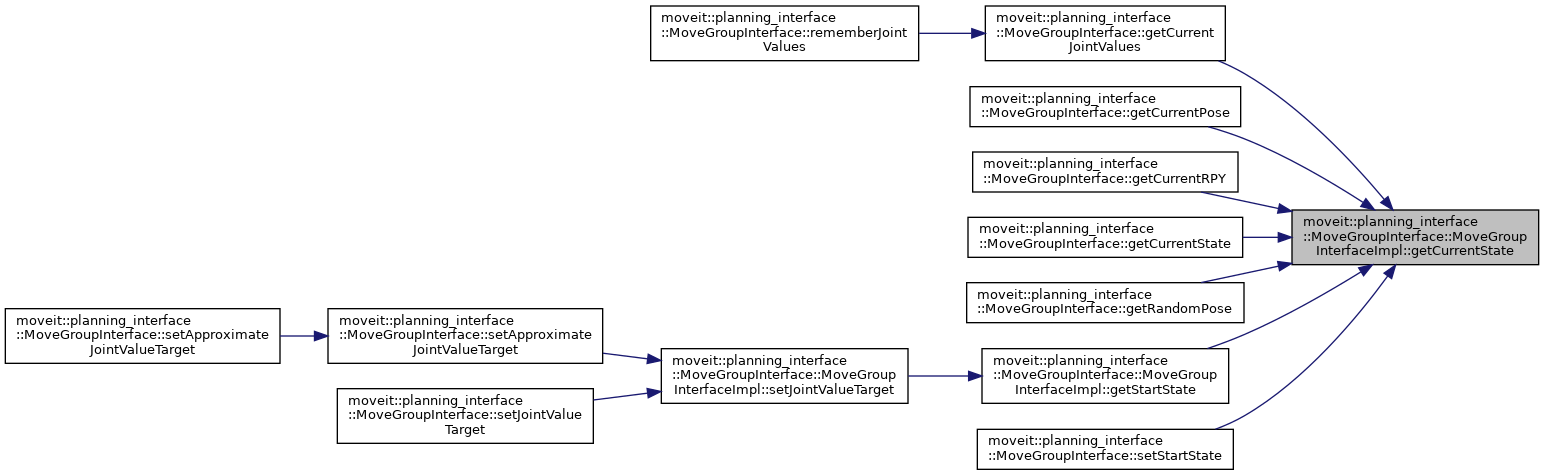
| bool | getCurrentState (moveit::core::RobotStatePtr ¤t_state, double wait_seconds=1.0) |
| moveit::core::MoveItErrorCode | plan (Plan &plan) |
| moveit::core::MoveItErrorCode | move (bool wait) |
| moveit::core::MoveItErrorCode | execute (const moveit_msgs::msg::RobotTrajectory &trajectory, bool wait, const std::vector< std::string > &controllers=std::vector< std::string >()) |
| double | computeCartesianPath (const std::vector< geometry_msgs::msg::Pose > &waypoints, double step, moveit_msgs::msg::RobotTrajectory &msg, const moveit_msgs::msg::Constraints &path_constraints, bool avoid_collisions, moveit_msgs::msg::MoveItErrorCodes &error_code) |
| void | stop () |
| bool | attachObject (const std::string &object, const std::string &link, const std::vector< std::string > &touch_links) |
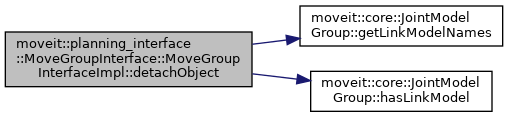
| bool | detachObject (const std::string &name) |
| double | getGoalPositionTolerance () const |
| double | getGoalOrientationTolerance () const |
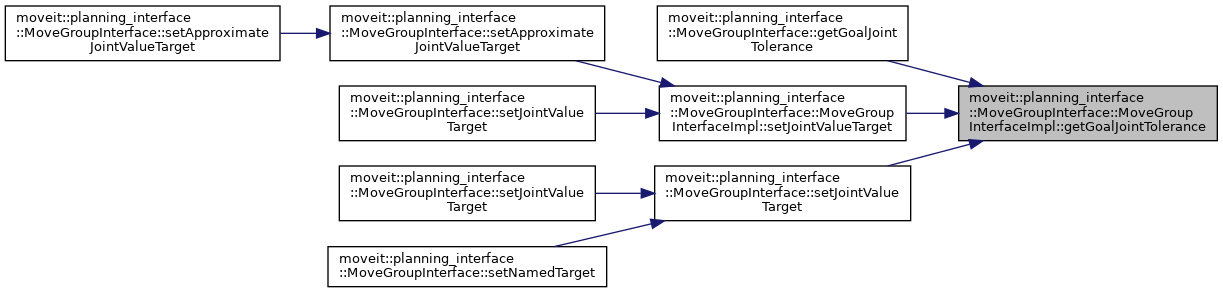
| double | getGoalJointTolerance () const |
| void | setGoalJointTolerance (double tolerance) |
| void | setGoalPositionTolerance (double tolerance) |
| void | setGoalOrientationTolerance (double tolerance) |
| void | setPlanningTime (double seconds) |
| double | getPlanningTime () const |
| void | constructRobotState (moveit_msgs::msg::RobotState &state) const |
| void | constructMotionPlanRequest (moveit_msgs::msg::MotionPlanRequest &request) const |
| void | constructGoal (moveit_msgs::action::MoveGroup::Goal &goal) const |
| void | setPathConstraints (const moveit_msgs::msg::Constraints &constraint) |
| bool | setPathConstraints (const std::string &constraint) |
| void | clearPathConstraints () |
| void | setTrajectoryConstraints (const moveit_msgs::msg::TrajectoryConstraints &constraint) |
| void | clearTrajectoryConstraints () |
| std::vector< std::string > | getKnownConstraints () const |
| moveit_msgs::msg::Constraints | getPathConstraints () const |
| moveit_msgs::msg::TrajectoryConstraints | getTrajectoryConstraints () const |
| void | initializeConstraintsStorage (const std::string &host, unsigned int port) |
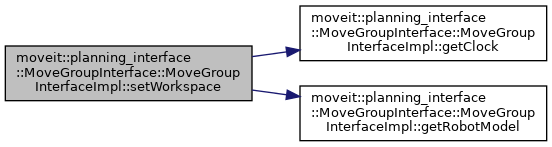
| void | setWorkspace (double minx, double miny, double minz, double maxx, double maxy, double maxz) |
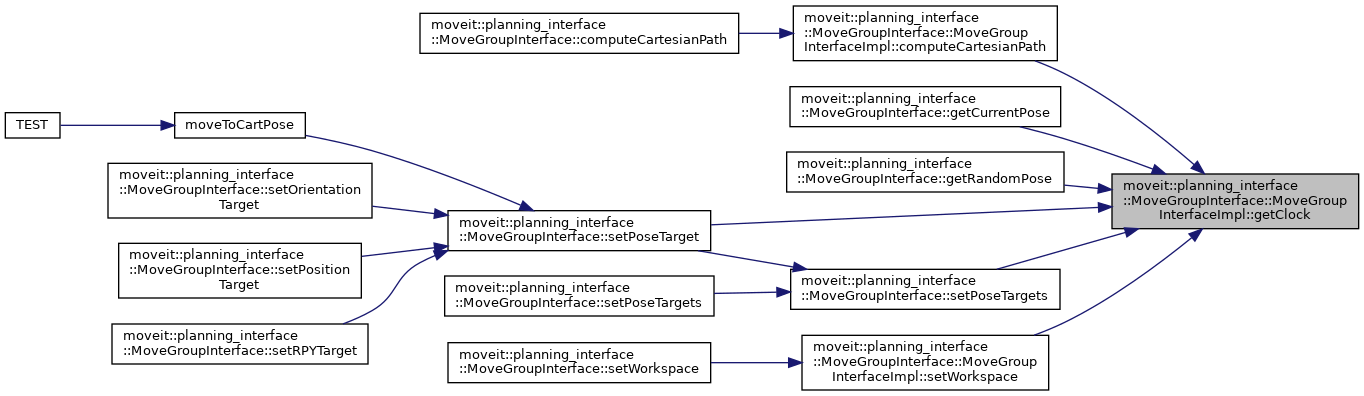
| rclcpp::Clock::SharedPtr | getClock () |
Detailed Description
Definition at line 119 of file move_group_interface.cpp.
Constructor & Destructor Documentation
◆ MoveGroupInterfaceImpl()
|
inline |

◆ ~MoveGroupInterfaceImpl()
|
inline |
Definition at line 211 of file move_group_interface.cpp.
Member Function Documentation
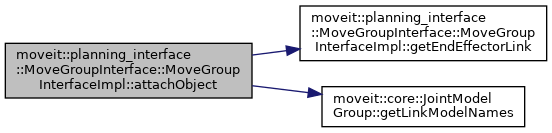
◆ attachObject()
|
inline |
Definition at line 923 of file move_group_interface.cpp.

◆ clearPathConstraints()
|
inline |
Definition at line 1111 of file move_group_interface.cpp.

◆ clearPoseTarget()
|
inline |
Definition at line 508 of file move_group_interface.cpp.

◆ clearPoseTargets()
|
inline |
Definition at line 513 of file move_group_interface.cpp.

◆ clearTrajectoryConstraints()
|
inline |
Definition at line 1121 of file move_group_interface.cpp.

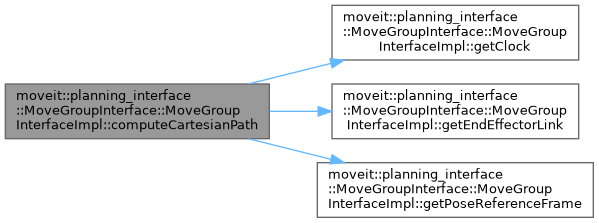
◆ computeCartesianPath()
|
inline |
Definition at line 873 of file move_group_interface.cpp.

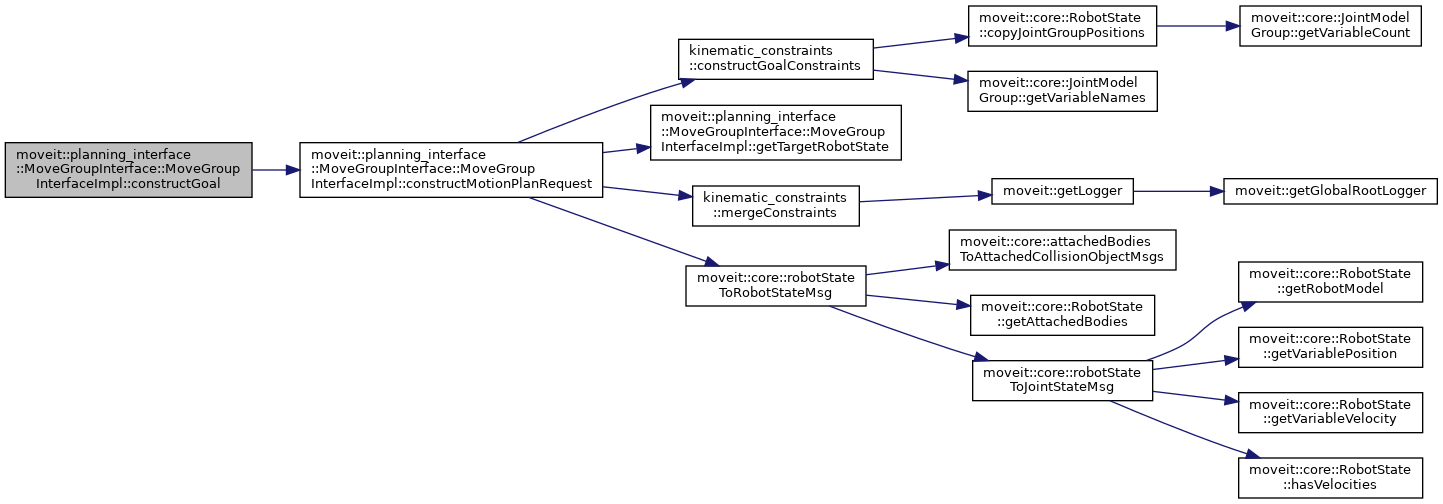
◆ constructGoal()
|
inline |
Definition at line 1083 of file move_group_interface.cpp.

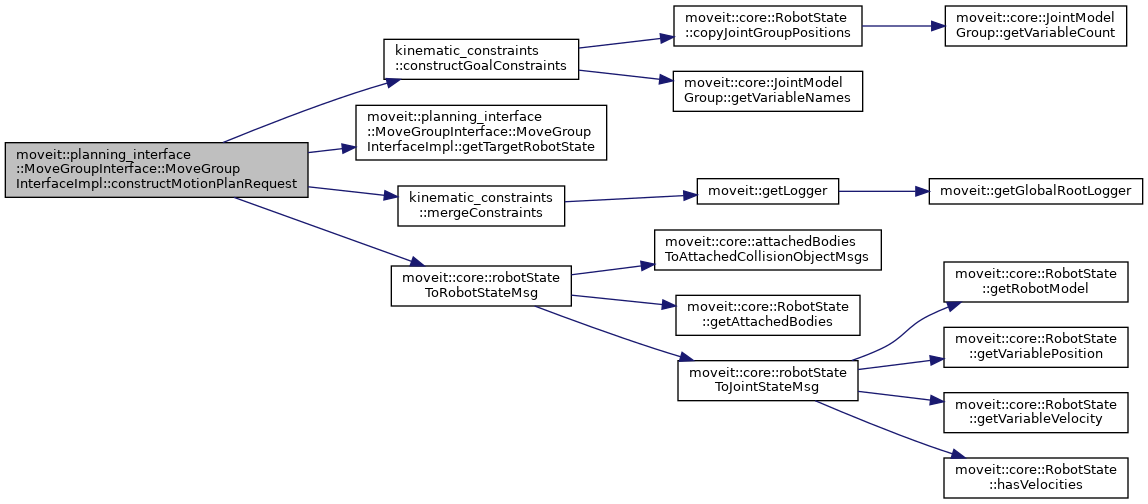
◆ constructMotionPlanRequest()
|
inline |
Definition at line 1029 of file move_group_interface.cpp.

◆ constructRobotState()
|
inline |
Definition at line 1024 of file move_group_interface.cpp.

◆ detachObject()
|
inline |
Definition at line 953 of file move_group_interface.cpp.

◆ execute()
|
inline |
Definition at line 805 of file move_group_interface.cpp.

◆ getClock()
|
inline |
Definition at line 1186 of file move_group_interface.cpp.
◆ getCurrentState()
|
inline |
Definition at line 635 of file move_group_interface.cpp.
◆ getDefaultPlannerId()
|
inline |
Definition at line 336 of file move_group_interface.cpp.


◆ getDefaultPlanningPipelineId()
|
inline |
Definition at line 313 of file move_group_interface.cpp.

◆ getEndEffector()
|
inline |
Definition at line 523 of file move_group_interface.cpp.


◆ getEndEffectorLink()
|
inline |
Definition at line 518 of file move_group_interface.cpp.
◆ getGoalJointTolerance()
|
inline |
Definition at line 993 of file move_group_interface.cpp.
◆ getGoalOrientationTolerance()
|
inline |
Definition at line 988 of file move_group_interface.cpp.

◆ getGoalPositionTolerance()
|
inline |
Definition at line 983 of file move_group_interface.cpp.

◆ getInterfaceDescription()
|
inline |
Definition at line 247 of file move_group_interface.cpp.

◆ getInterfaceDescriptions()
|
inline |
Definition at line 264 of file move_group_interface.cpp.

◆ getJointModelGroup()
|
inline |
Definition at line 237 of file move_group_interface.cpp.
◆ getKnownConstraints()
|
inline |
Definition at line 1126 of file move_group_interface.cpp.

◆ getMaxAccelerationScalingFactor()
|
inline |
Definition at line 386 of file move_group_interface.cpp.

◆ getMaxVelocityScalingFactor()
|
inline |
Definition at line 376 of file move_group_interface.cpp.

◆ getMoveGroupClient()
|
inline |
Definition at line 242 of file move_group_interface.cpp.

◆ getOptions()
|
inline |
Definition at line 227 of file move_group_interface.cpp.

◆ getPathConstraints()
|
inline |
Definition at line 1141 of file move_group_interface.cpp.

◆ getPlannerId()
|
inline |
Definition at line 361 of file move_group_interface.cpp.

◆ getPlannerParams()
|
inline |
Definition at line 280 of file move_group_interface.cpp.

◆ getPlanningPipelineId()
|
inline |
Definition at line 331 of file move_group_interface.cpp.

◆ getPlanningTime()
|
inline |
Definition at line 1019 of file move_group_interface.cpp.

◆ getPoseReferenceFrame()
|
inline |
Definition at line 604 of file move_group_interface.cpp.
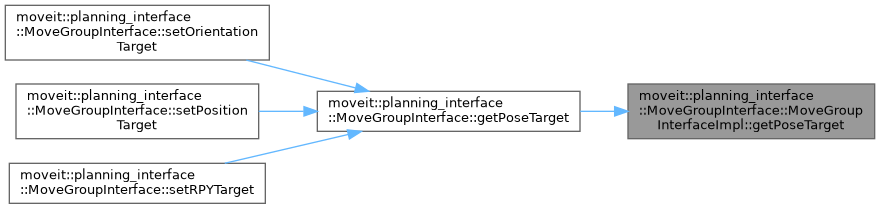
◆ getPoseTarget()
|
inline |
Definition at line 564 of file move_group_interface.cpp.
◆ getPoseTargets()
|
inline |
Definition at line 582 of file move_group_interface.cpp.

◆ getRobotModel()
|
inline |
Definition at line 232 of file move_group_interface.cpp.
◆ getStartState()
|
inline |
Definition at line 441 of file move_group_interface.cpp.


◆ getTargetRobotState() [1/2]
|
inline |
Definition at line 413 of file move_group_interface.cpp.
◆ getTargetRobotState() [2/2]
|
inline |
Definition at line 418 of file move_group_interface.cpp.
◆ getTargetType()
|
inline |
Definition at line 614 of file move_group_interface.cpp.
◆ getTF()
|
inline |
Definition at line 222 of file move_group_interface.cpp.
◆ getTrajectoryConstraints()
|
inline |
Definition at line 1153 of file move_group_interface.cpp.

◆ hasPoseTarget()
|
inline |
Definition at line 558 of file move_group_interface.cpp.
◆ initializeConstraintsStorage()
|
inline |
Definition at line 1165 of file move_group_interface.cpp.

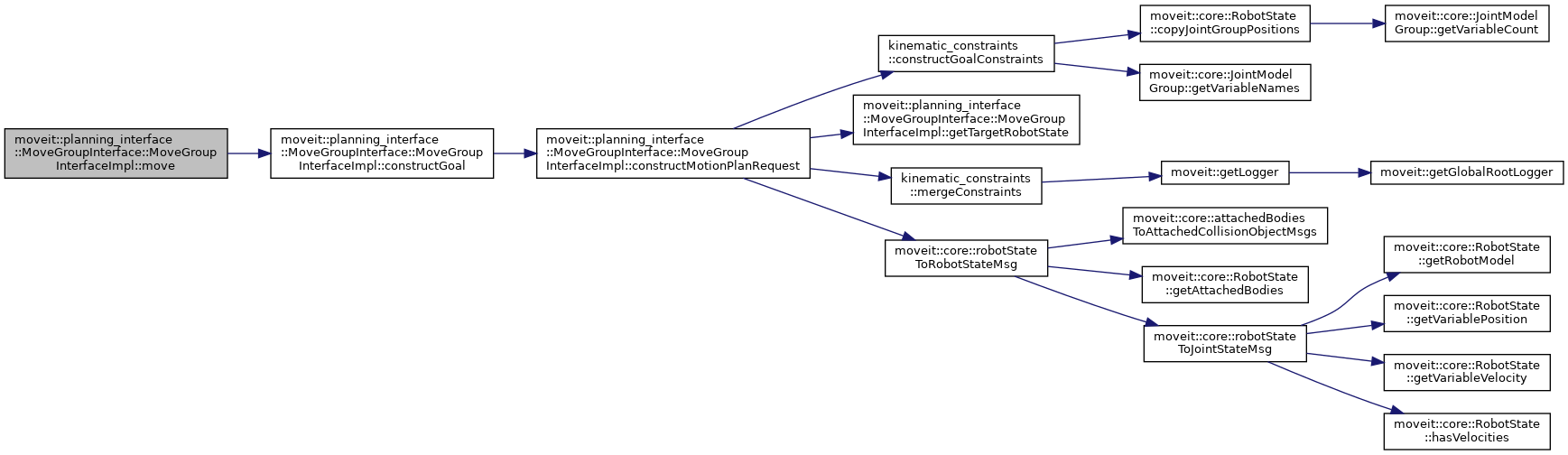
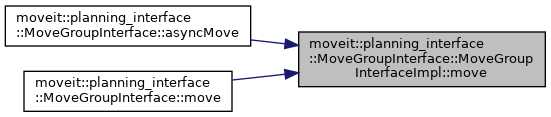
◆ move()
|
inline |
Definition at line 734 of file move_group_interface.cpp.
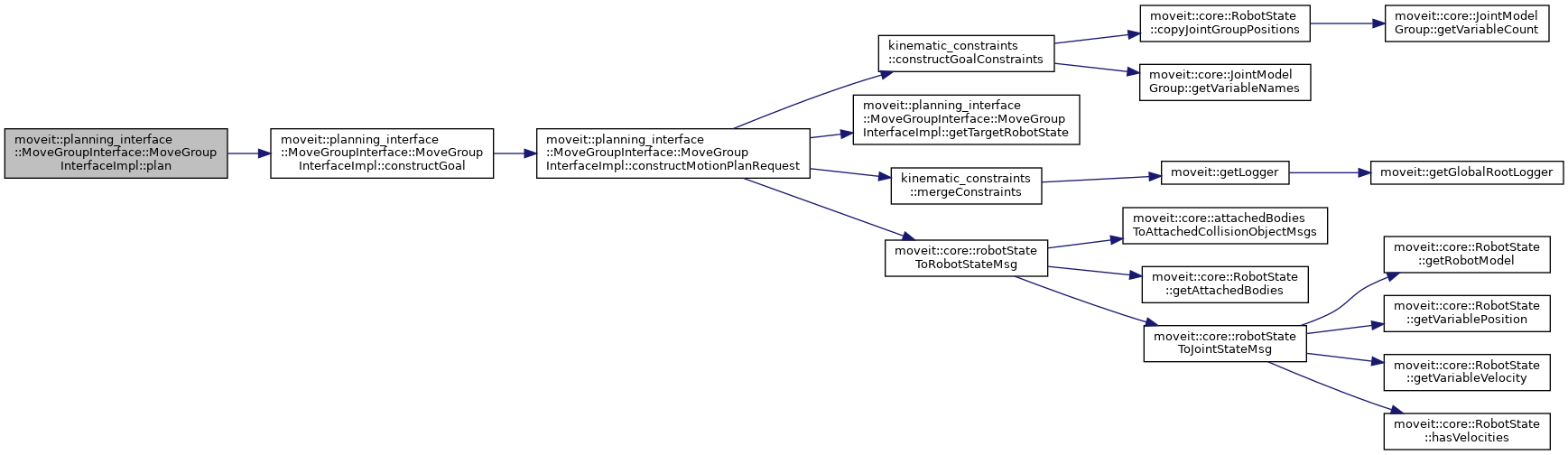
◆ plan()
|
inline |
Definition at line 657 of file move_group_interface.cpp.

◆ setEndEffectorLink()
|
inline |
Definition at line 503 of file move_group_interface.cpp.

◆ setGoalJointTolerance()
|
inline |
Definition at line 998 of file move_group_interface.cpp.

◆ setGoalOrientationTolerance()
|
inline |
Definition at line 1008 of file move_group_interface.cpp.

◆ setGoalPositionTolerance()
|
inline |
Definition at line 1003 of file move_group_interface.cpp.

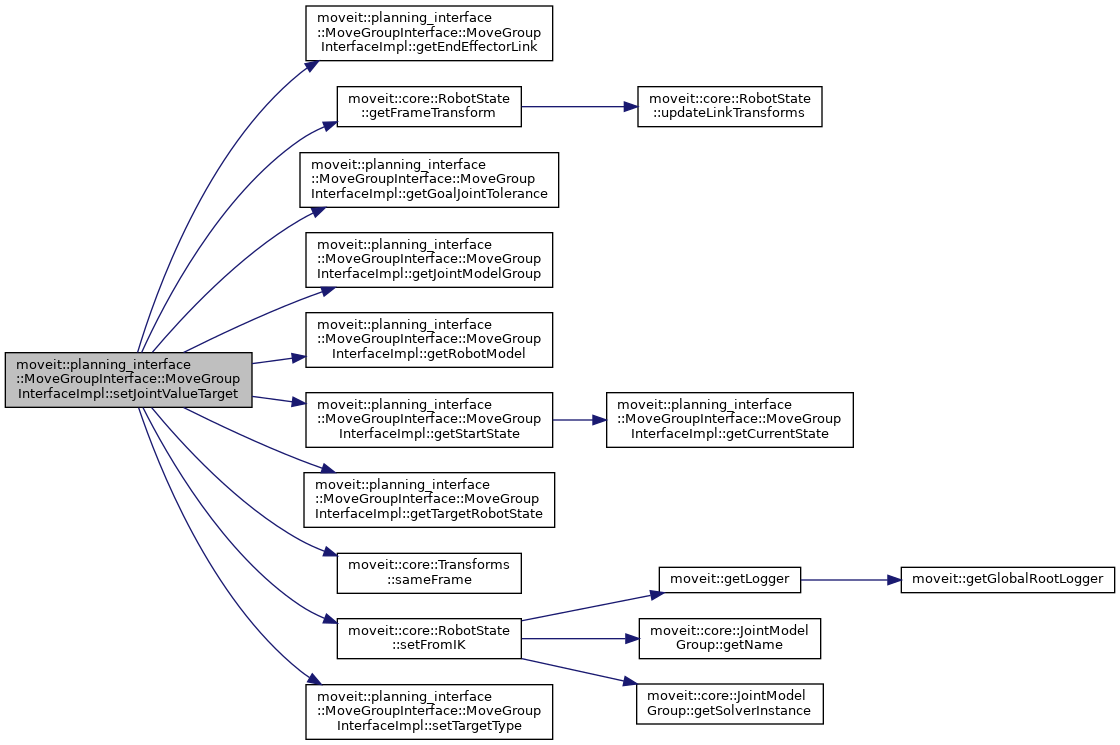
◆ setJointValueTarget()
|
inline |
Definition at line 449 of file move_group_interface.cpp.

◆ setMaxAccelerationScalingFactor()
|
inline |
Definition at line 381 of file move_group_interface.cpp.


◆ setMaxScalingFactor()
|
inline |
Definition at line 391 of file move_group_interface.cpp.

◆ setMaxVelocityScalingFactor()
|
inline |
Definition at line 371 of file move_group_interface.cpp.


◆ setNumPlanningAttempts()
|
inline |
Definition at line 366 of file move_group_interface.cpp.

◆ setPathConstraints() [1/2]
|
inline |
Definition at line 1088 of file move_group_interface.cpp.

◆ setPathConstraints() [2/2]
|
inline |
Definition at line 1093 of file move_group_interface.cpp.
◆ setPlannerId()
|
inline |
Definition at line 356 of file move_group_interface.cpp.

◆ setPlannerParams()
|
inline |
Definition at line 298 of file move_group_interface.cpp.

◆ setPlanningPipelineId()
|
inline |
Definition at line 320 of file move_group_interface.cpp.

◆ setPlanningTime()
|
inline |
Definition at line 1013 of file move_group_interface.cpp.

◆ setPoseReferenceFrame()
|
inline |
Definition at line 599 of file move_group_interface.cpp.

◆ setPoseTargets()
|
inline |
Definition at line 539 of file move_group_interface.cpp.

◆ setStartState() [1/2]
|
inline |
◆ setStartState() [2/2]
|
inline |
Definition at line 423 of file move_group_interface.cpp.

◆ setStartStateToCurrentState()
|
inline |
Definition at line 434 of file move_group_interface.cpp.

◆ setTargetType()
|
inline |
Definition at line 609 of file move_group_interface.cpp.
◆ setTrajectoryConstraints()
|
inline |
Definition at line 1116 of file move_group_interface.cpp.

◆ setWorkspace()
|
inline |
Definition at line 1174 of file move_group_interface.cpp.

◆ startStateMonitor()
|
inline |
Definition at line 619 of file move_group_interface.cpp.

◆ stop()
|
inline |
Definition at line 913 of file move_group_interface.cpp.

The documentation for this class was generated from the following file:
- moveit_ros/planning_interface/move_group_interface/src/move_group_interface.cpp